“`html
Mars’ta hareket etmek, dışarıdan bakıldığında oldukça basit bir işlem gibi görünse de, arka planda son derece karmaşık bir organizasyon süreci bulunmaktadır. NASA, Aralık 2025’te bu süreçte önemli değişiklikler yapacak bir adım attı. Ajans, Mars’taki Jezero Krateri içinde görevini sürdüren Perseverance aracının rotasını ilk kez kapsamlı bir dil modeli kullanarak belirledi.
Bu çerçevede NASA, Claude adı verilen yapay zeka modelini kullanarak Perseverance için detaylı bir sürüş planı oluşturdu. 8-10 Aralık tarihleri arasında Mars yüzeyinde yaklaşık 400 metre mesafe kat eden araç, bu yolu Claude’un önerdiği rota üzerinden izledi. Belirlenen güzergah, yoğun kaya parçalarının bulunduğu ve insan planlaması gerektiren zorlu bir bölgeyi kapsamaktadır.
Burada dikkat edilmesi gereken nokta, yapay zekanın aracı doğrudan yönetmemesidir. Claude, yalnızca sürüş için gerekli rota noktalarını üretti; bu noktalar daha sonra NASA mühendisleri tarafından doğrulandı ve onay süreçlerinden geçirildi. Yani Perseverance, komutlarını yine Dünya’dan aldı, ancak bu komutların temeli yapay zeka tarafından önerilen bir plan oluşturdu.
Mars’ta bir gezgin aracı yönlendirmek, göründüğünden çok daha hassas kararlar almayı gerektirir. En küçük bir eğim, gevşek zemin ya da keskin taş parçaları aracın kaymasına ya da tekerleklerin yerden boş dönmesine neden olabilir. Bu nedenle NASA ekipleri, Perseverance’ın inişinden itibaren her sürüşü, “ekmek kırıntısı” adı verilen detaylı ara noktalarla manuel olarak planladı.
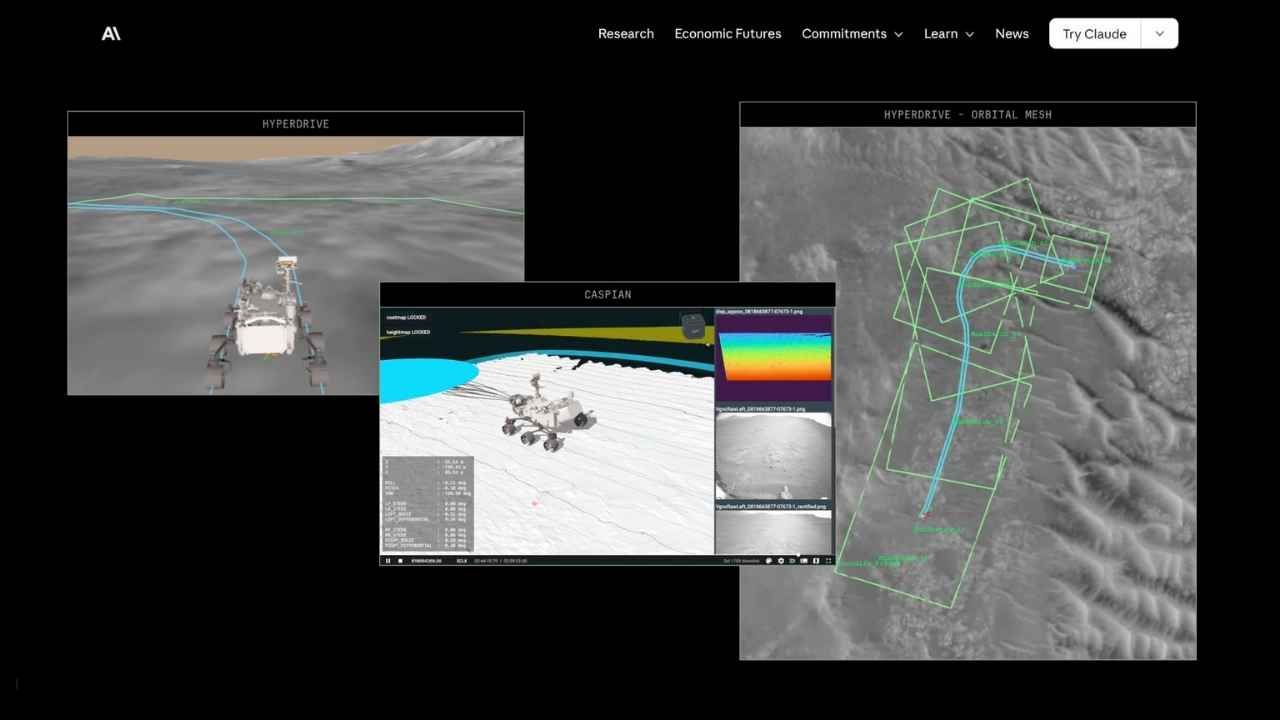
NASA, Mars yüzeyinde rota planlamasını yapay zekaya devretti
Claude’un bu görevi üstlenebilmesi için NASA, modele Perseverance’ın yıllar içinde topladığı görüntüler, haritalar ve sürüş verilerinden oluşan kapsamlı bir veri seti sağladı. Daha sonra Claude, her on metrede bir rota noktaları oluşturdu ve bunları kendi içinde değerlendirip gerektiğinde yeniden düzenledi. Süreç, tek seferlik bir komut yerine, adım adım ilerleyen sistematik bir planlama ile ilerledi.
Ortaya çıkan rota, Jet Propulsion Laboratory (JPL) mühendisleri tarafından günlük olarak kullanılan simülasyon ortamında test edildi. Ekipler, Claude’un önerdiği plan üzerinde yalnızca küçük düzeltmeler yaptı. Bu düzeltmelerden bazıları, Claude’un planlama sürecinde erişemediği, yere daha yakın çekilmiş güncel görüntülere dayanıyordu. Nihai rota bu kontrol süreçlerinin ardından Perseverance’a iletildi.
NASA’ya göre bu yöntem, rota planlama süresini yaklaşık yarı yarıya azaltma potansiyeli taşımaktadır. Daha az zaman alan planlama, mühendislerin daha fazla sürüşe izin vermesini sağlamakta ve bu durum Perseverance’ın daha fazla örnek toplayabilmesi ve bilimsel verimliliğinin artması anlamına gelmektedir.
Bu gelişme, NASA’nın içinde bulunduğu koşullar göz önüne alındığında ayrıca önem arz ediyor. Ajans, son dönemde ciddi personel kayıpları yaşadı ve bilim bütçesi üzerindeki baskılar devam etmekte. Daha az insan kaynağıyla daha fazla görev yürütme ihtiyacı, otomasyon ve yapay zeka destekli çözümlerin kaçınılmaz hale gelmesine yol açıyor.
Anthropic açısından bu çalışma, Claude’un yeteneklerini gerçek dünya koşullarında kanıtlayan somut bir örnek sundu. Kısa bir süre önce basit oyun senaryolarında zorluk çeken bir modelin, Mars yüzeyinde güvenli bir rota planlayabilmesi, büyük dil modellerinin kullanım alanlarının hızla genişlediğini göstermektedir.
NASA, ilerleyen yıllarda yapay zeka destekli otonom sistemlerin sadece Mars’ta değil, Güneş Sistemi’nin daha uzak bölgelerinde de görev yapacak keşif araçlarında değerlendirileceğini planlıyor. Bu yaklaşım, insan müdahalesinin gecikmeli veya sınırlı olduğu görevlerde keşif kapasitesini doğrudan etkileyen önemli bir unsur olarak görülüyor.
Teknoblog, teknoloji gündemini farklı platformlarda düzenli bir şekilde paylaşıyor. WhatsApp kanalında öne çıkan haberleri anlık olarak aktarıyor, Google Haberler üzerinden güncel içerikleri sunuyor, Instagram ve X hesaplarında dikkat çeken başlıkları özetliyor, YouTube kanalında ise ürün incelemeleri ve detaylı anlatımlarla içerikleri tamamlama görevini üstleniyor.
“`




